By Peter Kimball
Here's a six-minute video I cut together attempting to summarize our team's deployment experience.
Here's a six-minute video I cut together attempting to summarize our team's deployment experience.
|
By Peter Kimball Here's a six-minute video I cut together attempting to summarize our team's deployment experience.
0 Comments
By Evan Clark Today we took down what remained of SIMPLE camp - disassembling the Bot House, loading everything into crates, and hauling things off the ice in sleds. It was amazing how many details there were, how many different things had to come together to make this project work. Dismantling it all was a reminder of everything we had put together in the past few months, all of the hard work and support that got us here. We had been having glorious sunny weather for the past few weeks, but today the wind and chill picked up again, as if even Antarctica was bidding us farewell, saying "Remember who I really am!". We especially want to thank all the USAP personnel who helped us during this project. From the carpenters who built and un-built our camp structures, to the divers who helped us with underwater logistics (and rescued us), to the Fuelies who kept us warm and resupplied with fuel, to Fleet Ops who had our back for all heavy lifting needs, to the stewards in the galley who kept us well fed - truly we could not have done any of it without all of you. Also a huge shoutout to Dave Matson, our project mechanic from the MEC. You kept our camp running even when nothing else would.  One last view of Ross Island and McMurdo Station from SIMPLE camp. (Photo: Evan Clark). By Evan Clark Today was a bittersweet day, as it was ARTEMIS' final mission of the season. The sea ice conditions dictate that we must be completely cleared off the ice by Friday morning. After our previous long sea ice mission, we only had about 4.4 km of fiber remaining – not enough for another long mission. So we decided the best return on our remaining resources would be to conduct one last mission on the safety line investigating the sea ice / ice shelf transition in detail, which is well within our 1 km on-safety-line operational radius. For those who need a refresher, an ice shelf is glacial ice that formed on land and flowed off the continent to float on the ocean. The portion that is still on land is called the ice sheet, and the portion floating on the ocean is the ice shelf. Ice shelves are much thicker than sea ice, and their buoyancy helps support the weight of the ice sheets (glaciers) on land. This is why people are worried about them melting – if an ice shelf collapses, all the glaciers it holds up are free to slide into the ocean, which could raise global sea levels significantly in a short amount of time (meters, in the case of the West Antarctic Ice Sheet). It is a common misconception that melting icebergs raise sea level, but this isn't true. Try putting a piece of ice in a glass of water and letting it melt - it doesn't change the water level! What scientists are worried about is new ice entering the ocean because the ice shelves are no longer holding up the ice sheets. Sea ice is ice that formed from the ocean itself, and is much thinner than an ice shelf. Sea ice more or less melts and reforms every year with the seasons (there are some places with multi-year sea ice that does not melt completely). Our camp is on sea ice so that we can more easily drill through it to give ARTEMIS access to the ocean beneath, but this also means our season must end once it is no longer safe to be out and about on the melting sea ice. We really don't want to fall in! We conducted several zig-zag transects across the ice shelf transition with water samples along the way. Some of these transects were as close as possible to the ice ceiling to gather fine-grained sonar and imaging data, and some were further away to gather “patch tests” to help us determine the precise physical misalignment between the robot's navigational center and our acoustic mapping instruments, which will help us improve the quality of our maps in post-processing. I really enjoyed this mission because I got to fly ARTEMIS super close to the ice with challenging topography, Mark was stoked about the patch test data, which he has been thinking about for years, and Britney was excited about all the ice interaction science. We were all fascinated by the fact that this and every other time we have passed the transition, we have seen a huge abundance of wildlife (fish, shrimp, jellies) hanging out here compared to other places. Why do they like it here? We don't really know. But understanding why might help explain some dynamics of ecosystems in ice-covered environments, which in turn could inform our search for life in Europa's ocean. 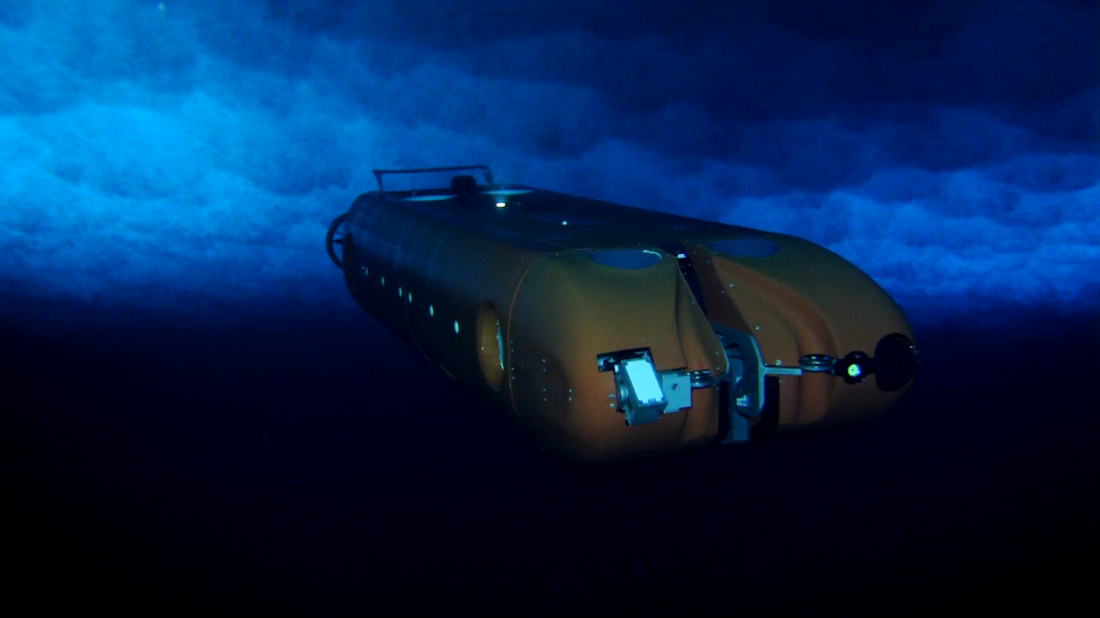 A last view of ARTEMIS under the sea ice near the borehole during the final mission. (Photo: Bill Stone). The next few days will be tearing down what remains of camp, hauling it back to town, and starting the long packing process to ship it off the continent. Brian, Luke, and I leave on Thursday, and most of the rest of the crew leaves on the 17th. We'll miss this place, the people, the adventure, and the beautiful things we've had the opportunity to witness through ARTEMIS' eyes.
By Peter Kimball I was able to post most of my most interesting photos from the field... with this major exception. One day back in September, before ARTEMIS was on station and before SIMPLE camp was fully established, John and I rode with Kevin and Gretchen to the ice edge to north of McMurdo. Kevin and Gretchen are plankton researchers who collect samples at the ice edge regularly. We took the opportunity to ride along with them to record the locations of the ice edge and nearby hazards in case they became relevant in an ARTEMIS "armageddon scenario". The sky was overcast in a slightly spooky way, but visibility was still good, and the terrain was breathtaking. We drove along the Cape Evans Route past the Dellbridge Islands, past an iceberg frozen into the sea ice, to the sea ice edge at the foot of Barne Glacier. The day was remarkable, but I didn't get the chance to process the photos and put up a post until now. At the ice edge, John and I were recording positions and Gretchen and Kevin were debating whether to deploy their sampling gear in the growing winds when three black dots appeared at a distant spot on the ice edge and began heading straight for us - Emperor Penguins. I took some photos as they approached us, looked at us and our Pisten Bully for a few minutes, and then moved along to other penguin business. Before heading home, we looked east at the beautiful Barne Glacier - water that has been frozen solid for 2000 years (i.e. since the time of Christ) flowing down the slopes of Mt. Erebus and into the Ross Sea. The glacier ends in a mind-bending ice cliff with Weddell seals hauled out on the cracked sea ice at the bottom.  The Barne Glacier flows into the Ross Sea from the slopes of Mt. Erebus. The glacier dwarfs Gretchen's Pisten Bully in this photo. Mt. Erebus is obscured by clouds in the background. (photo: Peter Kimball) On the way home, we had to stop as a group of around 15 Emperor Penguins crossed the route, marching over the sea ice toward Hut Point Peninsula on Ross Island.  Emperor Penguins march across sea ice, far from open water. (photo: Peter Kimball)  John sleeps in the back of the Pisten Bully, exhausted from an amazing day. (photo: Peter Kimball) By Evan Clark We are nearing the end of our field season. The ice is getting thinner, and soon it will not be safe to drive vehicles out onto the sea ice because of the danger of falling through. We've had a run of warm and sunny days in the last week, and it's amazing how fast the ice changes since it's daylight 24 hours. We are now driving over potholes filled with water, and it is especially pronounced near the transitions from sea to land, where the pressure of the ice hitting land causes fracturing, and fine volcanic particles tracked out onto the ice by vehicles leaving town darken the surface and accelerate melting. You almost need a helmet when riding in the Pisten Bully because you can be bounced right into the ceiling! Our camp takedown began on Saturday, when our fish hut was pulled off the ice, and the culvert below it was removed. Mel from fleet ops came out in his Challenger bulldozer to do the heavy lifting and hauling. It's sad to see it go – this was our project's first portal to the world beneath the McMurdo Sound, and both Bill and Sunfish performed many successful dives through this hole. All remaining dives will go through the main borehole in the bothouse. Other structures and pieces of big gear are following piecemeal. The Tweety Tent (galley) will be removed on Tuesday. Everything else, including the bothouse, will be completely off the ice by Friday Dec 11th. We will run a few more missions in the meantime, but the sense is definitely that things are winding down. We also took down our tents, so no more sleeping out at the SIMPLE site. Goodbye, camp life, we'll miss your beautiful vistas!  We'll miss the beautiful views from camp. (photo: Evan Clark) By Evan Clark After Fleet Ops and the Antarctic Support Divers kindly rescued ARTEMIS during our previous sea ice mission run without a robot safety line, we had some long and difficult discussions about the conditions leading up to the need for rescue. Much discussion focused on an effect we had anticipated long ago, but had perhaps not placed enough importance on: the forces on the robot when a large amount of data fiber is payed out in the water. Even though the data fiber is incredibly thin, over kilometers of line currents can build up significant forces, yanking the robot this way and that, and even threatening to snap the fiber completely. ARTEMIS spools fiber out of its tail to try to isolate some of these forces, but the system is not perfect. Additionally, the robot experiences a change in buoyancy and trim as more fiber is spooled out – the fiber is designed to sink to keep it away from gnarly ice “stalactites” we feared could tangle it on the ice ceiling during proximity operations, but this means that ARTEMIS tends to nose down and float upwards as fiber is removed (since the spool is at the rear). Hints of these effects had manifested themselves in our control instabilities during the previous sea ice mission (whose “fix” led to our need for rescue), but the tricky bit is that these effects had stayed minimal up to this point because all our missions using a safety line were confined to a relatively short 1km radius of the borehole (the length of the safety line). During a true 5 km mission, these effects could be much worse, but there was no present way to know how much worse without ditching the safety line and trying it. So we debated the dangers long and hard, but we decided the science was too valuable to not try – ARTEMIS would dive again off tether. Science is about exploring the unknown, and the unknown is risky. This is what ARTEMIS was made for. We decided to repeat the previous failed sea ice mission because we had already proven it was possible to rescue ARTEMIS under sea ice if it became disabled or lost, whereas under the ice shelf we had a larger chance of losing the robot permanently (the ice is too thick to drill). We set ARTEMIS out on the same track as last time. The objectives: Transect 5 km north of the borehole under sea ice at a ceiling standoff of 7 meters. Gather PAR (Photosynthetically Active Radiation), sonar maps, and other biological and oceanographic data along the way. At the 1 and 3 km marks, pause and rise to the ice ceiling so that the surface team could localize ARTEMIS using the magnetic beacon and ensure navigational accuracy with a GPS fix. At 3.3 km, approach closer to the ceiling and slow down to image the underside of Big John crack at high resolution using the sonars and the up-look camera. At the 5km mark, dive to 40m depth and perform a vertical upcast to the ceiling while taking water samples for later scientific analysis. At any point, if problems arose satisfying our mission abort criteria, we would turn around and come home immediately. We had Fleet Ops and the divers on standby in case another rescue operation was needed. The journey outbound went extremely smoothly, and we had a slight tail current to the NE, so we moved along quite quickly, and our battery reserves were high. We stayed as close as we safely could to the ice ceiling to gather PAR data. Our navigation performed admirably – each time we stopped to localize using the magnetic beacon, the surface team confirmed that our navigation error was less than 0.1%. On the way out, we missed Big John Crack because it looked underwhelming (the platelet ice had filled it in from below), so we drove past it thinking it was a smaller, less interesting crack. On the way back we did a good job of imaging it with our cameras and mapping it at high resolution with our sonars. We are very excited to analyze all the data in more detail. Once we turned around, many of our fears about the fiber forces were confirmed. The robot started having control difficulties, so I took over driving manually with the joystick (an Xbox controller) as a precaution. At about 3km from home, things started getting really difficult to control because of fiber forces and buoyancy changes. The fiber tension on the surface was getting tighter and tighter, so we knew that the current/drag forces had gotten large enough that ARTEMIS was still spooling fiber during the return leg, instead of pulling back the fiber payed out on the outbound leg. We also knew that it was only a matter of time until this force became strong enough to snap the fiber. Next time, we should have fiber spoolers on both the surface and the robot. Finally, although it was fighting me the whole way, I was able to bring the robot back home and dock it to the docking bar, and we pulled it up the borehole with a great collective sigh of relief. No rescue needed this time. It was definitely the most stressful video game I have ever played... We cut the fiber on the robot side because it had too much tension to recover it, and a few minutes later, the surface side snapped of its own accord. Post-mission analysis showed that we had spooled out 12.6km kilometers for our 5km out-and-back run. But we did the science we wanted, and we got the robot back. Definitely a success. By Peter Kimball  SIMPLE camp as seen from a USAP helicopter. (photo: Peter Doran) I was delighted to receive an aerial photograph of SIMPLE camp recently from Peter Doran. In addition to his work on the SIMPLE project, Peter does research in the dry valleys to the Northwest of McMurdo. He was able to spot SIMPLE camp and take this photo from a USAP helicopter while returning from the dry valleys. The photo shows the big blue bot house, the yellow galley tent, the grid of sleeping tents, two black outhouses, the orange fish hut, and various equipment crates. A Pisten Bully can be seen on parked next to the main generator on the left, while two snow machines are parked at center. The ice shelf transition is barely visible, running close to horizontal through the top half of the frame. Faint vehicle tracks cross from camp up onto the ice shelf through a flagged "stargate", visible as a few dark spots. Here are photos of the ice shelf stargate and tent rows that I took a few weeks ago.  A flagged "stargate" marks a safe spot for us to cross the transition from sea ice to the ice shelf. Our tracking teams use the stargate every time ARTEMIS goes beneath the ice shelf. (photo: Peter Kimball)  The SIMPLE camp tents sit in a neat grid. (photo: Peter Kimball) Well, a crazy work schedule and poor internet connection have made this post rather late. It has been an eventful past few days. Our operations have been smoothing themselves out, and by last Monday, we finally had successfully performed the tests we'd set to say the ARTEMIS was ready to venture out beyond a 1 km radius of the borehole. The under-ice environment was scouted, we had worked out the kinks in our launch and recovery operations through the sea ice, figured out how to run long missions and get the desired science and engineering data, and worked through several bugs and issues with sensors and systems in the under-ice environment in the McMurdo Sound. 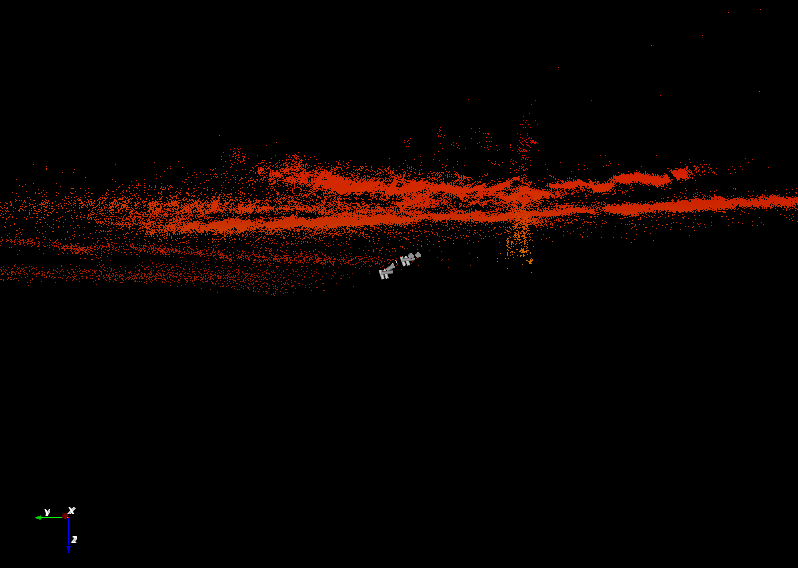 ARTEMIS dives away from the borehole to begin a mission in this view from our real-time sonar data visualizer. A skeleton depiction of ARTEMIS is in grey in the center, mapped portions of the ice ceiling show up in red, the docking bar assembly can be seen in orange towards the right with a part of the borehole culvert extending up above it. (image: Kristof Richmond) So we decided to make a long run under the sea ice as a rehearsal for under-shelf runs. This way, if anything went wrong, we'd have a chance of getting through the ice to pull ARTEMIS out. And we'd be able to gather some unique data on the sea ice environment to boot. We were fortunate to have Michelle from the PolarTReC program to join us and help document the day (she even helped us out with robot operations and cooked a mean pesto pasta---thanks Michelle!). Check out her blog to learn more about PolarTReC and Michelle's journalling on the impacts humans are having on Antarctica. Launch and mission initialization went quite well. We began the long transect under the sea ice north of the bot house. Everything going quite smoothly, but we detected that ARTEMIS was not controlling its trajectory as well as it had been on previous missions---likely due to the removal of some ballast weight to ensure it would float up against the ice ceiling in case something went wrong and some last minute tweaking on the vehicle hull to try to reduce drag. I attempted to send some commands to adjust parameters in the vehicle control system, and inadvertently triggered a previously-undiscovered bug that ultimately resulted in voltage spikes on the power system, bringing down the main vehicle processors. We were able to receive data from vehicle subsystems (cameras and the like), but could not get the main processor to respond, leaving ARTEMIS without a way to gather navigation information or actuate the thrusters. However, we had a back-up plan in place for precisely such an occasion: we were intentionally under the thinner sea ice (still 4 m thick), and had Mel and the reed drill, as well as the McMurdo divers Rob and Steve on standby. Brian was out tracking the vehicle and was able to quickly localize the magnetic beacon when it came on in emergency mode, and we hand-drilled a small hole to put a camera down and found ARTEMIS only a few meters away. Mel was soon on the scene and drilled out an access hole, and soon after Rob went in with a safety line and hooked ARTEMIS. In a surprisingly short amount of time (only a few hours), ARTEMIS went from being stranded under the ice to back warm and safe in the bot house. The bug that triggered the power fault was fixed, and several other improvements to the system identified. We will need one more run on our safety line to validate these fixes, but then are aiming for the ice shelf, which is too thick for anyone to drill through and rescue the vehicle. But that is what we came here for: to explore the unknown.
by Kristof Richmond Well, we haven't been updating much since Justin and Peter (and his beautiful photography equipment) left. We are working hard with reduced personnel. It is hard to believe, but I am leaving in two days as well. In the meantime, I thought I'd share some cell-phone snapshots of the activities around here. We did have a bit of a break over the weekend, when McMurdo takes two days off (instead of the standard one day per week) to celebrate Thanksgiving. We have been working almost non-stop for several weeks in a row, and decided it was time for the team to relax for a day as well. We all showed up in the evening to the town Thanksgiving feast. Most people here are far from family, and really go all out to make the celebration special. The galley went all out to make the day happen, even flying in fresh strawberries for dessert. Early the next day, a few of us headed out to the observation tube (see Peter's earlier post) just outside town and crawled down to take in the serenity and beauty of the ice underside that ARTEMIS experiences every time its out. Our time on the ice is short, and we are pushing to get as many missions as possible in before the beautiful weather makes moving equipment on the ice unsafe. The team will be working hard for the remaining time here.
By Evan Clark The environment beneath the ice in McMurdo Sound is other-worldly. Literally. That's part of the reason we are studying it - because it provides one of the best terrestrial analogs to what things might be like on Europa. ARTEMIS has 3 active cameras on board, and has been busy capturing scenes of the world below during our missions. Some of these scenes are incredibly beautiful - I can now understand why Antarctic divers reverently call going beneath the ice "entering The Cathedral". ARTEMIS flies under a school of fish while gazing up at the ice ceiling. It's amazing how the world below the ice can be so alien, and yet so the same - the fish look like birds underneath a bank of clouds. ARTEMIS approaches a sizable jellyfish which swam past our borehole.
By Peter Kimball 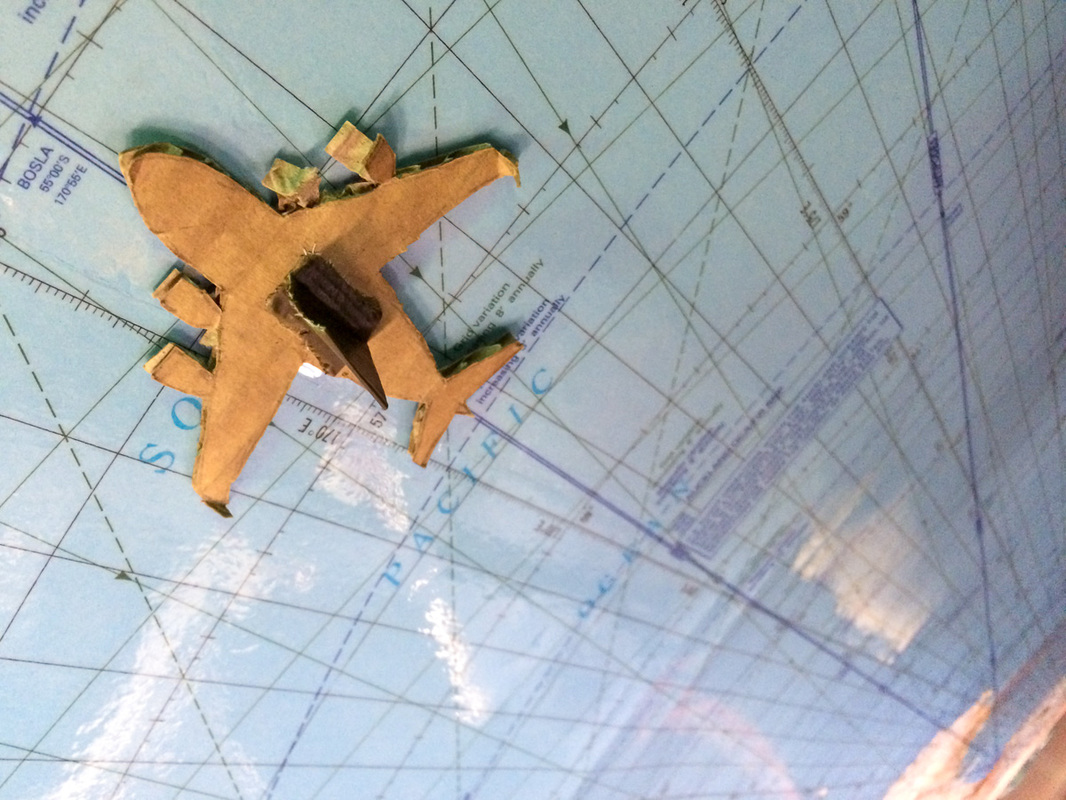 A cardboard cutout airplane marks our current position on a strip chart posted at the front of the C-17 and updated periodically by the flight crew. (photo: Peter Kimball) Yesterday was an emotional day as Justin and I departed Antarctica, leaving the rest of the SIMPLE field team to finish out the season. We're hitting full stride with ARTEMIS now, but there are several key challenges still standing between the team and the data we'd like to collect before the end of the season - a tough time to walk away. From the States, I'll be starting to write up our results for submission to the academic literature. I'll also be catching up on a few blog posts I wasn't able to make from the field and reading along whenever Evan and Kristof are able to post from the front lines. We sat on the C-17 with our new glaciochemist friends from Michigan (check out their field work here). Generally, the homeward bound on board were exhausted, but satisfied and excited to see family. At cruising altitude, folks got up and wandered around the aircraft, peering out the windows and stretching out to nap in the mostly empty cargo area. At the beginning of the flight, we watched the sea ice give way to open ocean. Just before landing in New Zealand, we watched the sun set for the first time in weeks. By Peter Kimball  The team watches live camera views and data from ARTEMIS during a dive beneath the McMurdo Ice Shelf. (photo: Peter Kimball) My scheduled time in the field has come to an end. However, high winds over the past several days have prevented incoming and outgoing C-17 flights, delaying my departure and allowing me a bonus ARTEMIS dive. I made an effort to get a few more photos of the bot house scene during that dive. 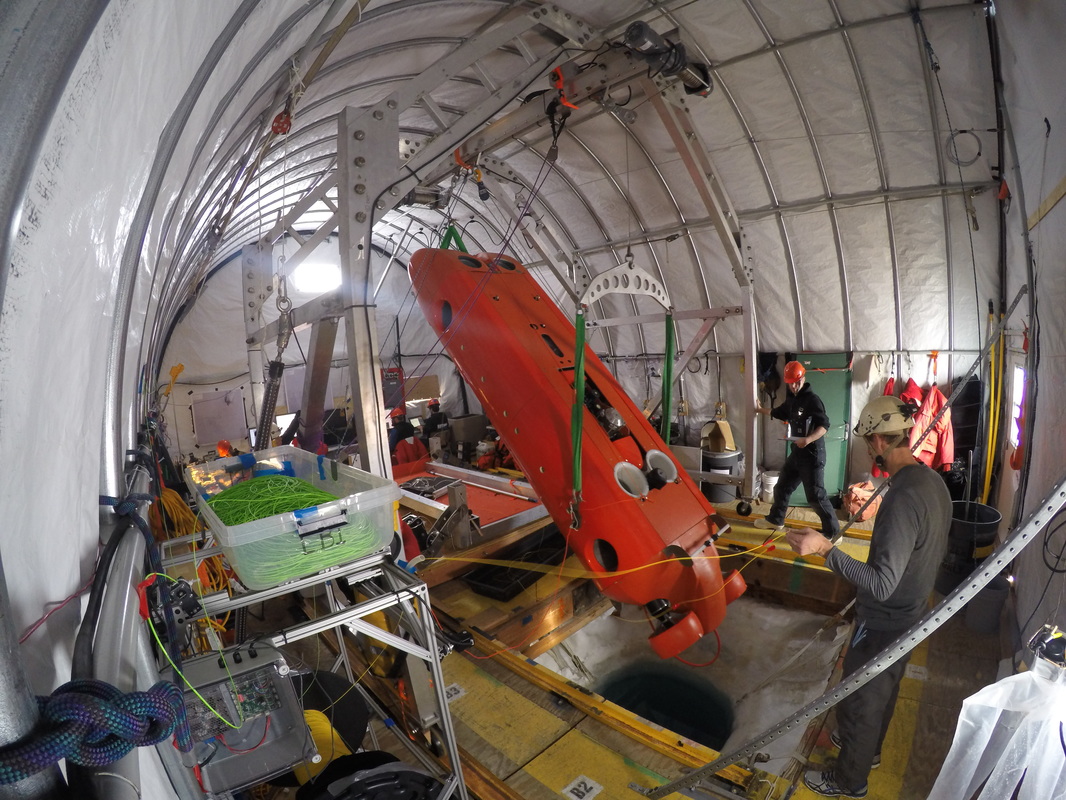 Josh, Vickie, Bill, and I go through the lifting checklist at the beginning of an ARTEMIS dive. (photo: Peter Kimball) I used some of my bonus time in Antarctica to implement live plotting of ARTEMIS's estimated position and heading in Google Earth. Mark set it up to be accessible to any computer on the bot house network. A wall projection of the display improves the team's situational awareness while ARTEMIS moves through various mission stages. Winds out on the sea ice have been fierce this week. The view back to McMurdo is often obscured, and we haven't glimpsed Mt. Erebus in days. Huge snow drifts are piling up all around our camp structures, and the vigorous flapping of the bot house constantly accompanies the sounds of our operations.  High winds whip up snow and degrade visibility out on the sea ice. (photo: Peter Kimball) By Peter Kimball  The SIMPLE team with ARTEMIS in the bot house: Bill, Kristof, Dave, Justin, Chris, Britney, ARTEMIS, Josh, Keith, Brian, Peter, Peter, Evan, Vickie, Luke, and Mark. (photo: Peter Kimball) Yesterday began with a group photo in the bot house. I'll have to superimpose John to get the entire field team, but this photo includes the entire group currently at McMurdo. We are getting more and more capable with ARTEMIS, and we're starting to do some serious science. Yesterday's dive featured a sampling transect in which ARTEMIS collected water samples and in-situ data at 7 stations distributed over 1.5 km spanning the ice shelf transition. The 3 km round-trip distance is a new record for ARTEMIS, and the science data set is the richest we've gathered yet. Brian was able to localize ARTEMIS with strong signal at all stations - through shelf and sea ice. The dive ended with a huge milestone for the programming team as ARTEMIS performed the first autonomous visual docking to the lighted docking bar under ice. 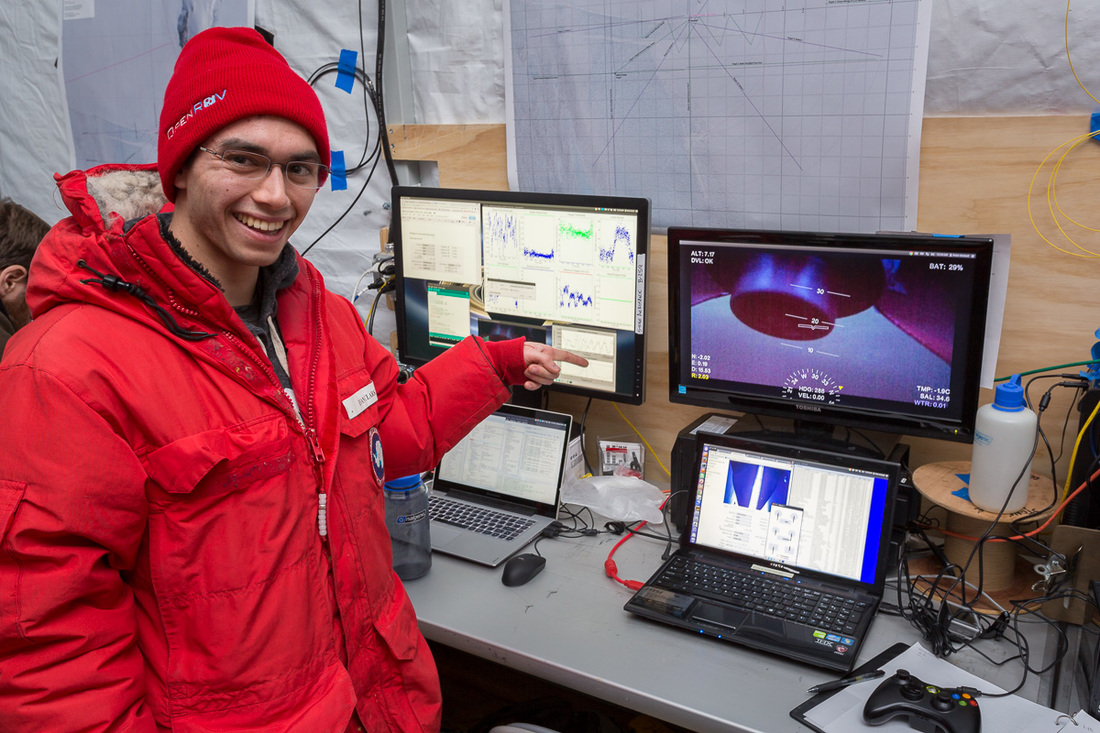 Evan, author of the dock detection software, is at a high stoke level after the first autonomous visual docking demonstration under ice. (photo: Peter Kimball) After the robot was safely docked, we pulled off another big first by extending the ARTEMIS science tower. Moving parts can be trouble, but the test went very well. Bill dove to observe the actuation test, and I ran over to the dive hut to snap a few pictures as he came back to the surface: As always, Antarctica was looking good from SIMPLE camp.  The late evening sun glints off of the Royal Society Range of the Transantarctic Mountains. (photo: Peter Kimball) By Peter Kimball  SIMPLE Camp in mid-season form. (photo: Peter Kimball) Progress is happening at a terrific rate in SIMPLE camp. We've been working very long days advancing our science and engineering goals. Other than a few ours of planning discussions, we've taken today off, with most folks opting to sleep for many hours, as we had ARTEMIS in the water until 4 am last night. The endless sunshine and super-long work hours are distorting our senses of time, but we remain ever conscious of the impending end of our field season. Happily, on our past few dives, we've achieved a number of exciting in-water milestones:
Here are some photos from those dives:  Justin and Brian track ARTEMIS beneath the sea ice about 500 m from camp. (photo: Peter Kimball) 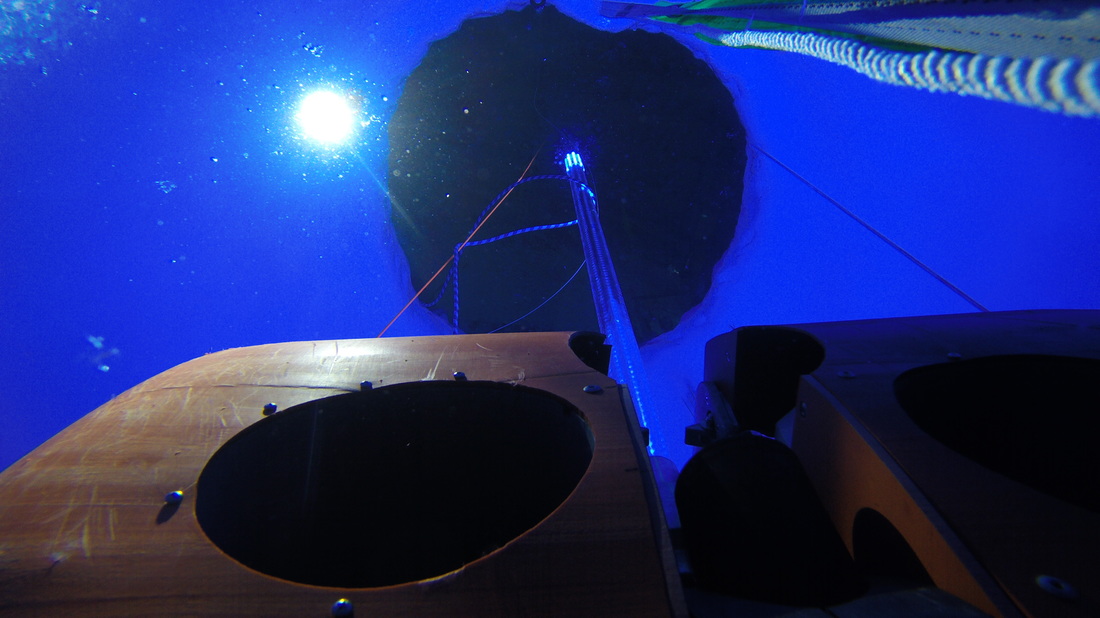 ARTEMIS is hauled up through the culvert on the docking bar. (photo: Peter Kimball) One of my favorite break activities is to step outside the bot house and snap pictures of whatever beauty is being offered up by the Antarctic environment at various times of day. It's still quite cold, and the wind is often vicious, but this place is easy on the eyes. Our camp is surrounded on all sides by amazing scenes.  The Royal Society Range West of SIMPLE camp. (photo: Peter Kimball)  Mt. Erebus, Hut Point Peninsula, McMurdo Station, and Mt. Terror to the Northeast of SIMPLE camp. (photo: Peter Kimball) By Peter Kimball Yesterday was a huge day for wildlife sightings. Those who stayed overnight at camp were surprised to find that a Weddell Seal had wandered into camp the night before. The seal was bloodied a bit from fighting (this is common), and rested near our camp for about a day and a half before moving on this evening. Evan, Justin, Vickie, and Brian followed the seal's trail yesterday morning hoping to find the open crack it had come from, but gave up after a half-mile journey in order to start work for the day. Keith and I arrived at camp by snowmobile later in the morning and enjoyed the chance to snap a few photos ourselves. It's important (and required by the Antarctic Treaty!) to keep enough distance not to disturb these animals, so I was happy to have a big lens with me. Heading back to McMurdo after a long day at camp, we encountered a single Adélie Penguin crossing the "road." This was an unlikely sighting so far from open water, and the first penguin ever seen by several members of our team. We spent a few minutes taking pictures, gave a wide berth, and headed home delighted. By Peter Kimball We made some great strides with ARTEMIS yesterday. Buoyancy trim is still not perfect (ARTEMIS has a slight lean to starboard), but after Saturday's adjustments, the vehicle was sitting level enough yesterday that we were able to perform a 10 hour dive with some exciting results. We:
Here are some photos of the surface tracking operations led by Brian. Brian was pleased with the tracking system performance through the ice, and was able to localize ARTEMIS even at 35 m water depth. In these pictures, try to imagine 7 m of sea ice and brash ice underneath the feet of the tracking team, with ARTEMIS at 35 m water depth, and the bottom of the Ross Sea 700 m below. The docking bar test was very exciting. I was "at the wheel" driving ARTEMIS onto the bar. The system worked very well, and now we've got our first set of images of the docking bar under ice as seen by the actual ARTEMIS cameras. Evan is using these images to validate our automated visual docking system. The first fully-automated docking run will be a real milestone for our project, and we feel it getting very close. Here are some views from the ARTEMIS camera of the docking bar during our piloted approach and docking run. Since the docking bar hangs straight down through the culvert (and is covered in super-bright LEDs), we can see ARTEMIS attached to it from the surface. With so many exciting steps taken, group morale was very high at the end of yesterday's dive. However, we are now feeling serious schedule pressure. As the austral summer advances, the sea ice beneath our camp will break up and blow out to sea. We have ambitious goals and only a few precious weeks remaining here on the ice.
By Peter Kimball We had our third ARTEMIS dive last night and made excellent progress on ballasting. We had to make a few changes to the ARTEMIS configuration between our last tests in Texas and our first dives here in McMurdo Sound. As a result, we've had to adjust the number and locations of ballast weights in ARTEMIS to get it to sit level in the water. Bill dove beneath the ice to make some ballast adjustments last night. We hope to complete ballasting with some adjustments in the bot house today. Here's a quick collection of clips form the GoPro we attached to Bill's dive helmet last night. We use a large weight attached to the tail to hold ARTEMIS in a vertical orientation for deployment and recovery through the culvert. The end of the video shows Bill attaching the recovery weight before turning around and surfacing through the fish hut culvert. The yellow, red, and black tubes are Bill's surface air supply, communications, and pressure depth measurement. 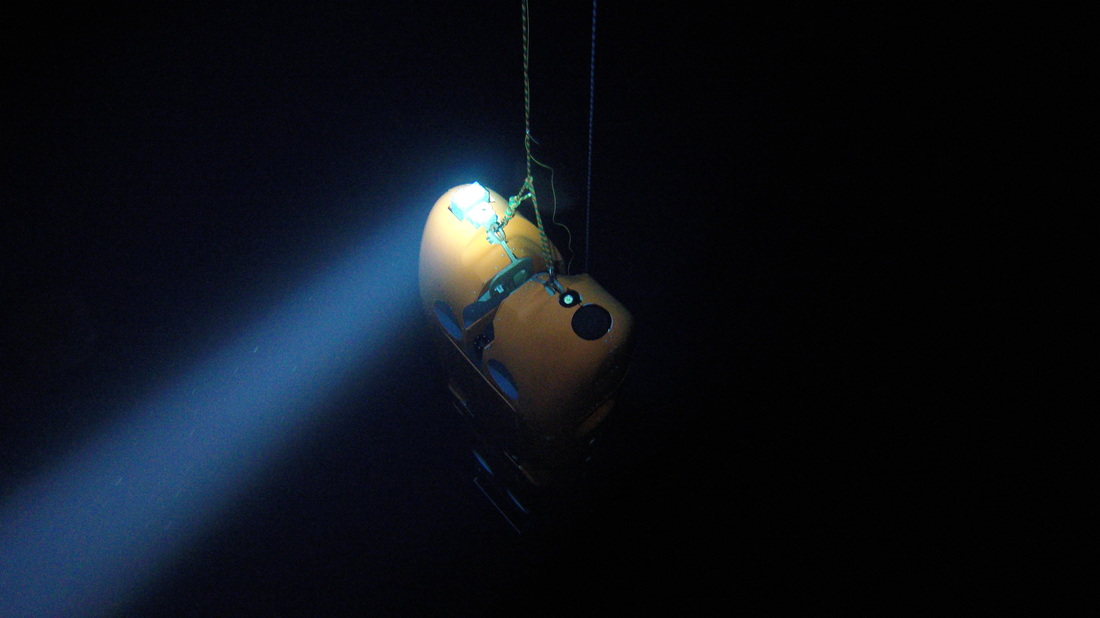 ARTEMIS hangs in a vertical orientation with tail weight attached, ready for recovery. (photo: Bill Stone) By Peter Kimball I went with Keith, Brian, and Justin to the McMurdo Sound observation tube today. Set up by the USAP a few hundred feet offshore, the observation tube is shaped like a large thermometer, with a roughly 25 foot descent through a pipe into a small bulb with windows. The pipe runs down through the sea ice, and the bulb windows provide a view into the water all around. The view is spectacular, but we all throught the sounds of the underwater environment were the highlight of the excursion. The high-pitched sounds of distant seals can be heard faintly in the tube.
By Peter Kimball It seems the life-on-other-worlds motivation for our project has settled into the subconscious of McMurdo. The word "stargate" has come up independently in multiple disparate contexts relating to our field work. In a field safety meeting, we described the flagged access route from our camp up onto the ice shelf as a "stargate". Now, completely independently, the USAP carpenters have installed a really nice new stair access to the bot house, and called it STARGATE - the Sea-Ice To Artemis Robot Garage Advanced Terrestrial Entry. These stairs, their name, and their abundant labeling are all totally fantastic. Meanwhile, the bot house drill hole took on a particularly "stargate" appearance last night as we lowered ARTEMIS (with its headlight on) out of the culvert and into the open ocean for the first time. We used the ARTEMIS thrusters to maneuver around the area beneath the culvert (still in a vertical orientation), and confirmed the result of our ballasting efforts based on the scale readings from the night before.  Vickie watches ARTEMIS descending into the ocean through the culvert. (photo: Peter Kimball) 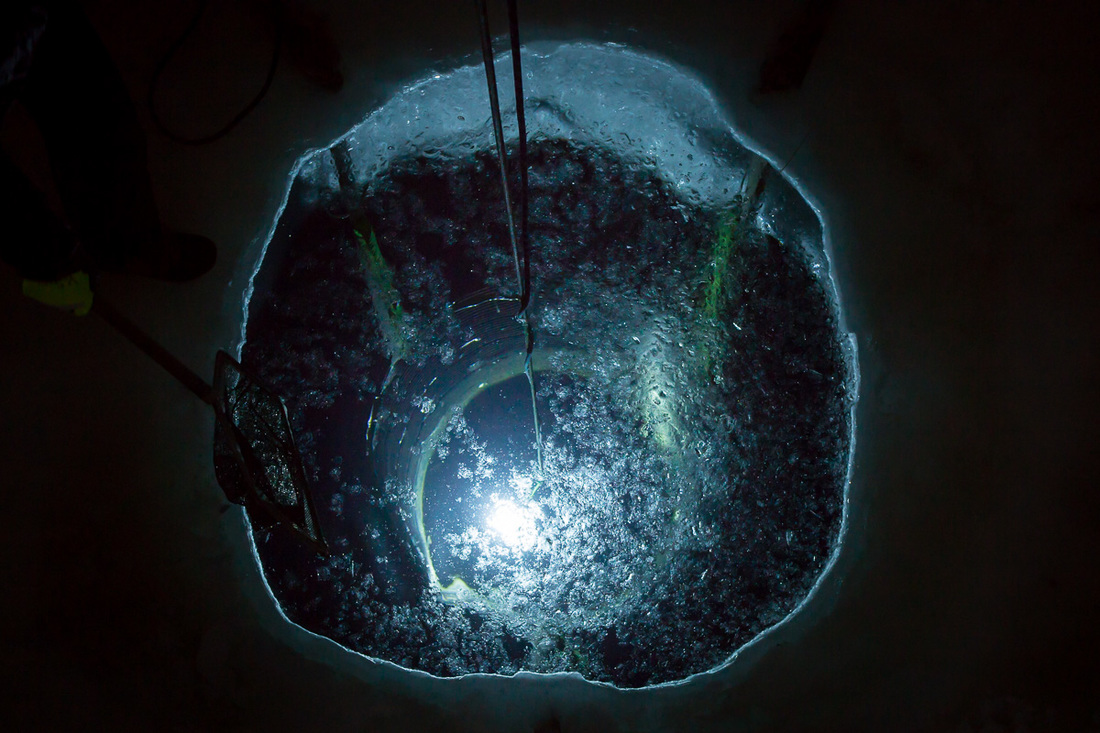 The ARTEMIS headlight gives the culvert and drill hole a "stargate" appearance. (photo: Peter Kimball) By Peter Kimball 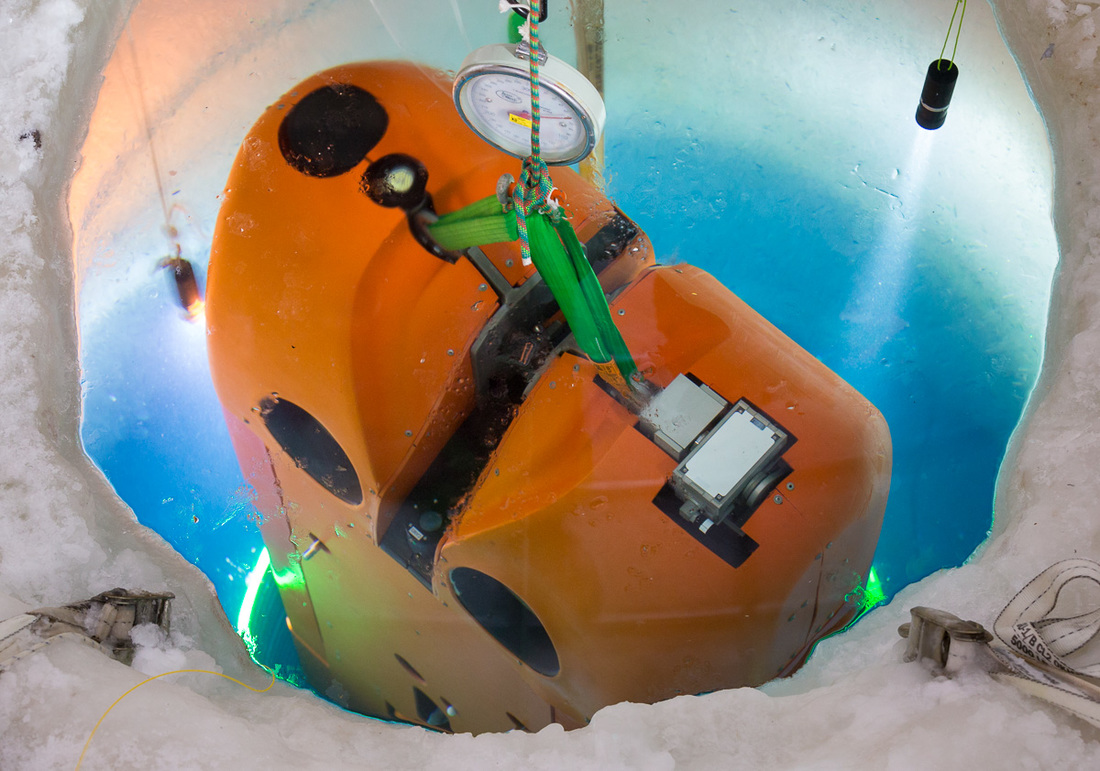 ARTEMIS sits fully submerged in the drill hole. The culvert liner glows in the dive lights used to check the vehicle orientation and mechanical clearance. (photo: Peter Kimball) Yesterday (Monday), we submerged ARTEMIS in the Ross Sea for the first time. This is a huge milestone for us, but also one that we hope will feel insignificant soon as we progress to more ambitious operations. The day started with priming of the pumped water instruments and sampling lines. These need to be filled with seawater (and emptied of air) before ARTEMIS can go in the water for buoyancy adjustment. The science team used a Niskin Bottle sampler to bring up seawater from beneath the culvert for this purpose. Meanwhile, the software and mechanical teams prepared the vehicle for submersion. The actual dunking process was slow as we were very careful about mechanical interference between the robot and the culvert. We were able to fully submerge ARTEMIS and record its weight in water using a calibrated dial spring scale from Crary lab supply. This was the first step in the critical process of ballasting ARTEMIS to sit at near neutral buoyancy in the water of the Ross Sea. From McMurdo and from our field site, the sun crosses over Mt. Discovery (or behind just two weeks ago!) at about midnight. The weather was a little nasty yesterday, but easing as we finally left the field site a little after 11 pm. The low sun and easing weather provided an epic view to the South as we headed home for the night.  Nighttime sun glints off of continental ice beyond Mt. Discovery. (photo: Peter Kimball) By Peter Kimball  Britney gives the Nov 1 Sunday Science Talk. (photo: Peter Kimball) Britney gave the third of three talks by our project in the Sunday Science Talk series this past Sunday. We continue to be happily surprised by the high level of interest in our project from the McMurdo community - Britney's talk was very well attended and very well received on Sunday.  Britney answers audience questions after her Sunday Science Talk. (photo: Peter Kimball) By Peter Kimball  ARTEMIS is lifted into the moon pool in a full test of the ARTEMIS mechanical launching system. (photo: Peter Kimball) We were out at the bot house yesterday, and stopped just short of putting ARTEMIS in the water. We completed a successful test of the lifting system used to put ARTEMIS in the water. The weight of ARTEMIS (1300 kg in air) and limited ceiling height in the bot house make lifting and rotation for launch and recovery a bit intricate. Here's a cross-section rendering Bill made showing how it works. 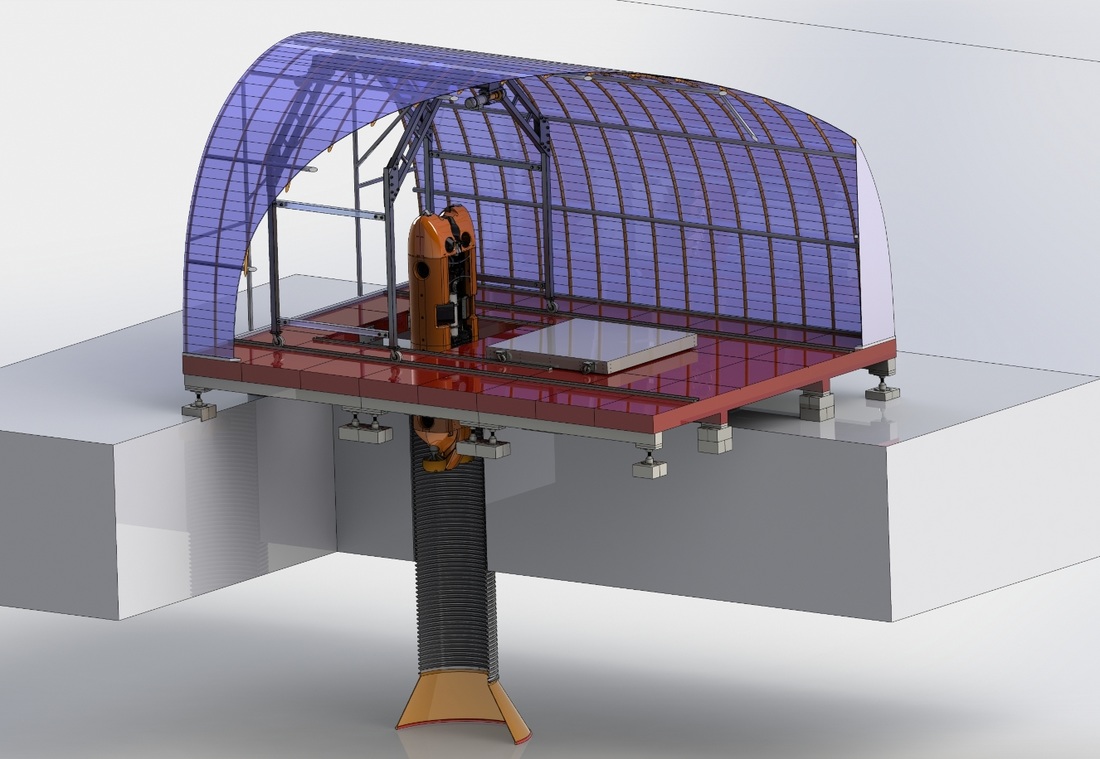 Cross-section of the ARTEMIS bot house showing ARTEMIS being lowered into the culvert. (image: Bill Stone) By Peter Kimball We came back from the field yesterday just in time to fire down some dinner and head over to the McMurdo Station Halloween Party. Halloween is effectively a high holiday here, with most people preparing months in advance, and many even packing costume elements and special materials with their weight-limited baggage when leaving the U.S.
I was on the wrong end of the preparedness spectrum, but managed to piece together a "Fun Police" costume that ended up being quite enjoyable. Because of the sunglasses and mustache, many people didn't recognize me, even in conversation. I issued citations and written warnings for things like "excessive style", but found it was most fun to issue "written commendations" to people with excellent costumes and "meritorious service citations" to people like the DJs, bartenders, and galley staff. David, one of the Crary Lab Assistants made himself an excellent ARTEMIS costume, complete with thrusters, spooling fiber, docking slot, and headlight. Those of us on the project were really impressed by it, and really happy to hear the uproar of applause he got during the costume contest. He was the landslide winner of the Antarctic Theme round. One of the rec office folks was dressed as the ARTEMIS docking rod, covered in front & back lines of flashing blue LEDs. It is a great feeling to have other people on station getting excited about our project. Britney made some waves when she stepped up to the DJ booth, got them to play California Love, took the mic, and rapped the lyrical entirety of that song from memory... an excellent night for the SIMPLE squad. By Evan Clark On Tuesday, we did another Sunfish operation to check out the newly installed culverts beneath the Bot House and the Fish Hut, and to test some navigational software improvements. We were easily able to find both culverts underwater, and fly Sunfish to perform an up-close visual inspection.  Sunfish view of the Fish Hut culvert from below the ice. We also used Sunfish to create a 3D sonar map of the area beneath ARTEMIS camp, which can be seen in the video below. Color in the point cloud is mapped to the point's water depth. Both culverts are visible as cylindrical tubes piercing through the ice, and only the bottom surface of the ice is visible - the ice extends about 6m above the ice ceiling. Also of interest is a "belling out" of the Fish Hut borehole at the bottom (green data) from the recent additional melting necessary to install the Fish Hut culvert. Sunfish can be seen holding position about 10m below the ice ceiling. Rotating around sonar point cloud generated by SUNFISH of the area underneath ARTEMIS field camp.
|



ARTEMIS is part of the SIMPLE project, supported by NASA ASTEP.
About the BlogThis is the personal blog of Peter Kimball and Evan Clark, following our deployment with the ARTEMIS long-range underwater robotic vehicle to explore beneath the McMurdo Ice Shelf in Antarctica.
Authors
Peter Kimball is an aerospace engineer and field roboticist on the Stone Aerospace ARTEMIS project.

Evan Clark is a computer scientist and field roboticist on the Stone Aerospace ARTEMIS project.

Kristof Richmond is a mechanical engineer and field roboticist on the Stone Aerospace ARTEMIS project.
Archives
January 2017
|
 RSS Feed
RSS Feed